Jaké jsou typy elektromotorů a jak se liší – Elektrikář sám
Odborník v sekci „Dotaz pro elektrikáře“, autor článků. Elektrikář pro opravy a údržbu elektrických zařízení, více než 5 let praxe.
Tímto článkem začínáme sekci Elektromotory na webových stránkách Sam Elektrik, protože každý elektrikář a dokonce i domácí kutil by měl alespoň obecně rozumět tomu, jaké typy a druhy stejnosměrných a střídavých elektromotorů existují, a také vlastnostem jejich konstrukce a použití. Materiál bude strukturován následovně: stručně se budeme zabývat typy elektromotorů a jejich rozdíly a pro podrobnější studium konkrétní konstrukční možnosti poskytneme odkaz na samostatnou publikaci.
Jak fungují motory
Princip činnosti všech typů elektromotorů spočívá v interakci magnetických polí rotoru a statoru. V tomto případě může být magnetické pole vytvořeno permanentním magnetem nebo vinutím (elektromagnetickou cívkou).
V závislosti na výkonu a typu motoru mohou být vinutí umístěna pouze na statoru nebo na statoru i rotoru. Pokusíme se vysvětlit zařízení a princip činnosti pro elektrikáře-numery.
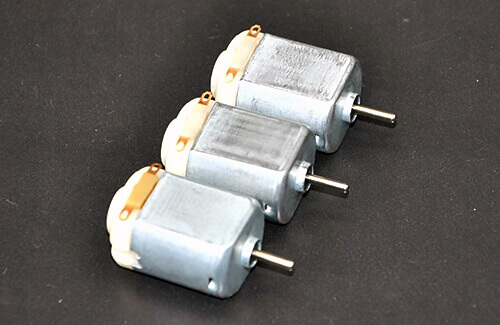
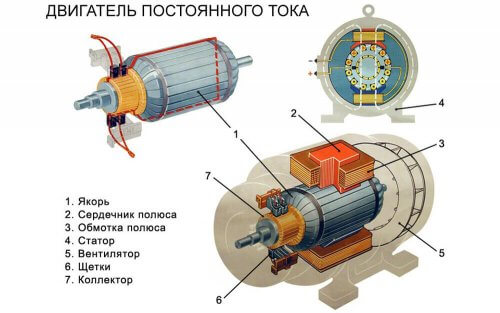
Začněme pohledem na strukturu kolektorových elektromotorů. Například u malých stejnosměrných kolektorových motorů, jako jsou ty pro rádiové modely, jsou na statoru umístěny permanentní magnety a v rotoru jsou navinuty cívky z měděného drátu. Proud je do cívek rotoru takového elektromotoru přiváděn přes kartáčovou sestavu sestávající z kartáčů a kolektoru. Kolektor má lamely, ke kterým jsou připojeny svorky vinutí.

Po zapnutí napájení se rotor (kotva) začne otáčet, k němu je připevněn kolektor a stacionární kartáče se střídavě dotýkají různých párů lamel kolektoru. Proud je do vinutí rotoru přiváděn přes kartáče a lamely, nejprve do jednoho vinutí, poté do druhého, čímž vzniká proměnlivé magnetické pole, které interaguje s magnetickým polem. V důsledku toho se póly rotujícího a stacionárního elektromagnetu přitahují, což způsobuje rotaci.
Pokud pomineme některé nuance, pak čím větší je proud rotoru, tím větší je toto pole a tím rychleji se rotor otáčí. To se však týká hlavně stejnosměrných a střídavých kolektorových strojů (jsou univerzální).

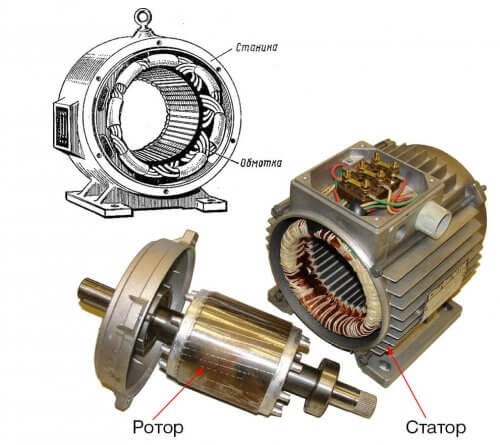
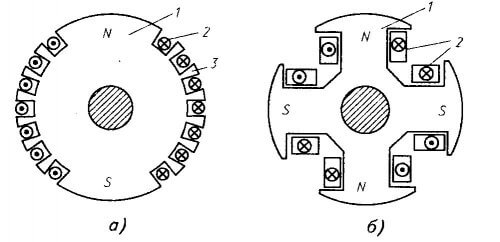
Pokud mluvíme o asynchronním motoru (AM) s rotorem veverkové klece, jedná se o střídavý elektromotor bez kartáčů. V něm jsou vinutí umístěna na statoru (a) a rotor je tvořen tyčemi (b), zkratovanými kroužky – tzv. klec veverky.
V tomto případě rotující magnetické pole statoru generuje proud v rotorových tyčích, což také vytváří další magnetické pole. Co se ale stane, když jsou dva magnety umístěny vedle sebe?
Vzájemně se odpuzují nebo přitahují. Protože je rotor na koncích upevněn v ložiskách, rotor se začne otáčet. AM je určen pouze pro střídavý proud a rychlost otáčení hřídele závisí na frekvenci proudu a počtu pólů ve vinutí statoru, tuto problematiku si podrobněji rozebereme v článku o asynchronních elektromotorech.
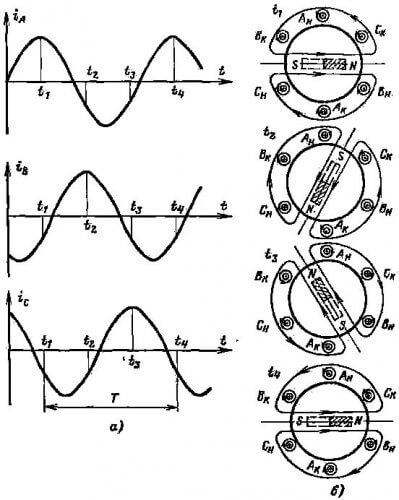
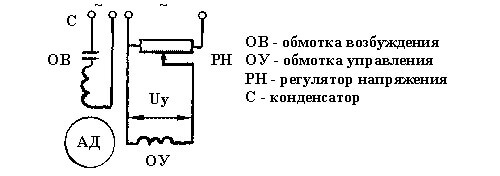
Aby se však hřídel takového motoru roztočila, je důležité ji buď rozhýbat (dat jí počáteční otáčky), nebo vytvořit rotující magnetické pole. Vytváří se pomocí vinutí uspořádaných určitým způsobem, připojených k třífázové elektrické síti (například 380 V), nebo pomocí spouštěcích a pracovních kondenzátorů (v tzv. kondenzátorových asynchronních motorech).
Kromě interakce magnetických polí se na otáčení hřídele elektromotoru podílí i Ampérova síla.
Proto je nutné pochopit, že moment na hřídeli abstraktního motoru a počet otáček závisí na konstrukci a typu elektrického stroje, stejně jako na síle proudu a jeho frekvenci. Opakuji, že v tomto článku se nebudeme podrobně zabývat konstrukčními vlastnostmi každého typu a typu elektromotoru, ale vytvoříme pro to samostatné články.

Za zmínku stojí, že asynchronní a univerzální kolektorové motory jsou nejběžnější v každodenním životě a ve výrobě, v pohonech stavebních strojů. Používají se všude, jak pro pohyb průmyslových mechanismů, tak i pro automobily, elektrickou dopravu a používají se v domácích spotřebičích, až po elektrický zubní kartáček.
Hlavní klasifikace
Elektromotory se tedy dělí hlavně na stroje pracující na stejnosměrný proud a na střídavý proud. O rozdílu mezi střídavým a stejnosměrným proudem jsme hovořili v článku: https://samelectrik.ru/chem-otlichaetsya-peremennyj-tok-ot-postoyannogo.html. Budeme se zabývat typy elektromotorů, počínaje stroji pracujícími na střídavý proud.
AC motory
Většina elektrických strojů používaných ve výrobě i v každodenním životě, pro pohon výtahů a v jiných typech elektrických pohonů pracuje na střídavém proudu.
Střídavé motory lze rozdělit následovně:
- asynchronní;
- synchronní.
V tomto případě se asynchronní motory rozlišují buď konstrukcí rotoru:
- s rotorem veverkovitého typu (nejběžnější s libovolným počtem fází);
- s fázovým rotorem (pouze třífázové).
A podle počtu fází:
- jednofázové (se spouštěcím kondenzátorem) se používají v domácích elektrických ventilátorech a jiných nízkoenergetických zařízeních;
- kondenzátorové nebo dvoufázové (jedná se o jednofázové s kondenzátorem, který se během provozu nevypíná, díky čemuž vzniká „druhá“ fáze) se používají v malých čerpadlech, ventilaci, v pračkách typu „baby“ a starých modelech vyrobených v SSSR;
- Třífázové jsou nejrozšířenější a používají se všude ve výrobě.
Existují různá provedení jednofázových střídavých motorů, seznam ukazuje dvě hlavní možnosti!
Charakteristickým rysem všech asynchronních elektromotorů je, že otáčky rotoru jsou o něco menší než otáčky magnetického pole statoru a rovnají se:

kde n je počet otáček za minutu, f je frekvence napájecí sítě, p je počet pólových párů, s je skluz a „60“ jsou sekundy za minutu.
Otáčky rotoru jsou tedy určeny frekvencí napájecí sítě, konstrukcí vinutí, respektive počtem pólových párů (cívek) v něm a velikostí skluzu.
Skluz je hodnota, která charakterizuje, o kolik nižší je frekvence otáčení rotoru vzhledem k frekvenci rotujícího magnetického pole. Za normálních provozních podmínek se pohybuje v rozmezí 0,01-0,06. Zjednodušeně řečeno, pole ve statoru s jedním párem pólů se otáčí rychlostí:
Se dvěma páry – 1500 ot/min a se třemi páry – 1000 ot/min.
Při skluzu, řekněme, 0,05, budou otáčky rotoru:
Pro regulaci otáček takových elektromotorů se používají frekvenční měniče, protože ostatní proměnné ve výše uvedeném vzorci nemůžeme ovlivnit.
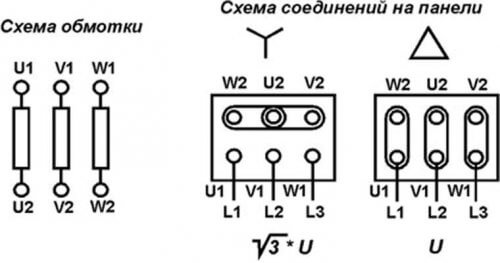
Nejběžnější asynchronní motory v Rusku jsou ty s napájecím napětím 220 V pro připojení vinutí v trojúhelníkovém zapojení a 380 V v hvězdicovém zapojení.
Pokud je u třífázového elektrického stroje točivé statorové pole vytvořeno uspořádáním vinutí a fázovým posunem v síti o 120˚, pak u jednofázových strojů se takový efekt nepozoruje. Hřídel se bude otáčet, pokud ji nastavíte na počáteční otáčení ručním otáčením hřídele nebo instalací fázově posuvného kondenzátoru, který vytvoří fázový posun na spouštěcím vinutí.

Dvoufázové kondenzátorové motory jsou konstruovány podobným způsobem, ale druhé vinutí se po spuštění nevypne, ale pokračuje v práci přes kondenzátor. Proto se název „dvoufázový“ spíše vztahuje ke konstrukci a schématu zapojení, nikoli k silovým obvodům. Dvoufázové i jednofázové jsou určeny pro provoz ze sítě 220 V.
Synchronní elektromotory (SM) se téměř vždy vyrábějí s budicím vinutím na kotvě a budicí proud se na ni přenáší buď kartáčovou sestavou, nebo se indukuje pomocí elektromagnetického systému.
To je nezbytné, aby se jeho hřídel otáčela frekvencí, která se shoduje s frekvencí otáčení statorového pole. To znamená, že v tomto případě neexistuje parametr jako skluz.
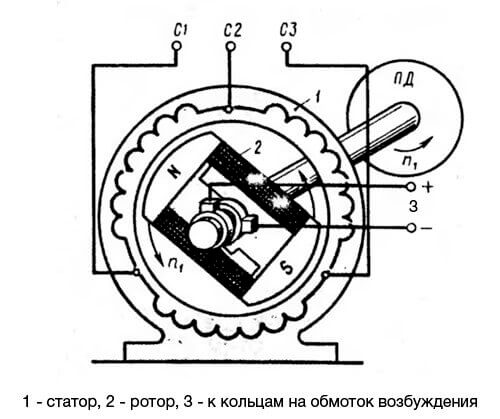
Budící proud je dodáván ze speciálních budicích systémů, jako je například „generátor-motor“ nebo elektronické měniče na tyristorech nebo tranzistorech. Nejběžnějšími zařízeními v domácích podnicích jsou VTE, TVU atd.

Ne vždy je přítomno budicí vinutí a kartáče, například v mikrovlnné troubě se v pohonu otáčení desky používá synchronní motor s permanentními magnety.
Synchronní stroje jsou s vyčnívajícími póly a bez nich. Vizuální rozdíly spočívají v konstrukci rotoru, v praxi se liší jejich charakteristikami, výrobními metodami a konstrukčním provedením. V praxi se s nimi běžný domácí elektrikář pravděpodobně nesetká.
Zbývá říci to hlavní o střídavých motorech – je obtížné regulovat jejich rychlost otáčení, protože jejich otáčky jsou vázány na rychlost. Pokles napětí (proudu) na statoru nebo buzení (u synchronních a asynchronních s fázovým rotorem) vede k poklesu točivého momentu a zvýšení hodnoty skluzu (u AM), zatímco hřídel se může otáčet pomaleji. Pro regulaci rychlosti takových motorů potřebujete frekvenční měnič. Jak vybrat frekvenční měnič, jsme vám řekli v článku: https://samelectrik.ru/vybor-chastotnogo-preobrazovatelya.html.
Stejnosměrné motory (DC motory)
Existují následující typy a druhy stejnosměrných elektromotorů:
- Stejnosměrné kolektorové motory. Skládají se z magnetů nebo budicí cívky a kotvy, proud je přenášen do vinutí kotvy pomocí kartáčové sestavy, jejíž nevýhodou je postupné opotřebení.
- Univerzální kolektorové motory. Podobné jako předchozí, ale mohou pracovat na stejnosměrný i střídavý proud.
- Bezkartáčový nebo bezkartáčový. Skládá se ze statorových vinutí, na rotoru jsou instalovány permanentní magnety. Připojen k stejnosměrnému obvodu pomocí speciálního regulátoru, který spíná statorová vinutí.
Kolektorové motory lze rozdělit do skupin podle typu buzení:
- se samobuzením;
- s nezávislým buzením.
Podle typu zapojení budicích vinutí se rozlišují takto:
- Sériové buzení umožňuje dosáhnout vysokého točivého momentu na hřídeli, ale volnoběžné otáčky jsou také velmi vysoké a mohou poškodit motor (neúspěch).
- Paralelní buzení – v tomto případě jsou otáčky stabilnější a nemění se při zatížení, ale točivý moment na hřídeli je menší.
- Smíšené vzrušení kombinuje výhody obou typů.
U nízkovýkonových kolektorových stejnosměrných motorů je buzení nejčastěji organizováno pomocí permanentních magnetů.

U nezávislého buzení v kolektorovém elektromotoru nejsou vinutí statoru a rotoru vzájemně propojena, ale jsou v podstatě napájena z různých zdrojů. Tímto způsobem je možné organizovat regulaci točivého momentu nebo otáček a také dosáhnout větší energetické účinnosti.
V závislosti na konstrukci může takový elektromotor pracovat buď pouze se stejnosměrným proudem, nebo se střídavým i stejnosměrným proudem. V druhém případě se nazývají „univerzální kolektorové motory“. Jsou široce používány v každodenním životě, používají se v kuchyňských spotřebičích a elektrickém nářadí (brusky, vrtačky atd.).

Bezkartáčové motory nemají nevýhody, které jsou vlastní kolektorovým motorům, a to v důsledku absence kartáčové sestavy. Proud je přiváděn do tří statorových vinutí a vinutí jsou spínána pomocí regulátoru. Ve skutečnosti jsou bezkartáčové stejnosměrné motory napájeny převedeným střídavým proudem. Princip fungování těchto motorů se můžete dozvědět z následujícího videa:
Konstrukčně se podobají synchronním motorům, až na to, že místo elektromagnetů se používají permanentní magnety. Pro otáčení takového motoru a zvýšení jeho účinnosti se používají Hallovy senzory, které určují polohu hřídele a správné spínání vinutí.

Často se jim říká ventilové motory a v anglicky psaných zdrojích se takové motory v závislosti na provedení nazývají PWSM nebo BLDC.

Používají se v počítačových chladičích, jako pohon pro rádiem ovládané modely, jako jsou kvadrokoptéry, a také v motorových kolech jízdních kol.
Další klasifikace
Kromě výše uvedených motorů stojí za zmínku i další typy, jako například:
- krokový motor;
- servopohony;
- lineární
- pulzující motory (podobné stejnosměrnému motoru, rozdíl je v tom, že energie je dodávána usměrněným pulzujícím proudem).
Krokové motory a servopohony se používají tam, kde je potřeba polohovat jednotku nějakého mechanismu. Nejjednodušším příkladem je CNC, 3D tiskárna atd. Také se pomocí „krokových motorů“ někdy ovládá poloha škrticí klapky automobilu – a to je jen malá část jejich použití.
Popis funkcí a vlastností těchto typů elektrických pohonů je tématem pro samostatný článek. Pokud máte zájem, napište komentáře a my to zveřejníme!
Lineární motor, na rozdíl od všech výše uvedených, má hřídel, která se pohybuje progresivně, nikoli rotačním pohybem. To znamená, že se neotáčí, ale pohybuje se „dopředu a dozadu“. Existují různé typy:
- střídavý proud, principiálně podobný synchronním a asynchronním elektromotorům;
- DC;
- piezoelektrický;
- magnetostriktivní.
V praxi jsou vzácné a používají se jako pohon pro jednokolejnou dráhu, pro napájení pracovního prvku v různých strojích.
Klasifikace uvedená v článku však byla zvolena z hlediska praktičnosti, zatímco v literatuře se navrhuje rozdělení elektrického pohonu podle následujících kritérií.
Podle specifik generovaného točivého momentu:
- hystereze;
- magnetoelektrický.
Další možnost klasifikace je založena na rozdílech v designu a vlastnostech jejich konstrukčního provedení.
Podle typu a umístění hřídele:
- s horizontálním uspořádáním hřídele;
- s vertikálním umístěním hřídele.
Ochrana před vnějšími vlivy prostředí:
- chráněno před vysokou vlhkostí a prachem;
- pro použití ve výbušných prostorách.
Podle trvání provozního režimu:
- přerušované (navijáky, jeřáby, motory ventilů);
- pro nepřetržitý provoz (čerpadla, větrání atd.).
Podle výkonu můžeme také rozlišovat stroje s nízkým, středním a vysokým výkonem. Nemá však smysl uvádět limity těchto výkonů, protože někde kolem 6 MW je průměrný výkon a někde kolem 1 kW je kolosální číslo.
V jednom článku není možné podrobně zvážit všechny typy, proto se budeme zabývat každou verzí zvlášť. Doufáme, že vám uvedená klasifikace stručně pomohla pochopit, jaké typy stejnosměrných a střídavých elektromotorů existují, a také jejich rozdíly a aplikační vlastnosti!
- Jak se získává střídavý elektrický proud?
- Typy stabilizátorů napětí
- Jak vyrobit jednoduchý elektromotor vlastníma rukama
Zveřejněno 10.04.2019 Aktualizováno 10.04.2019 Alexandrem (administrátorem)