Jaký je princip regulace teploty?
Všechny kresby, s výjimkou obr. 102, byly provedeny autorem.
Automatické řídicí systémy (ACS) slouží k regulaci jednotlivých parametrů (teplota, tlak, hladina, průtok atd.) v řídicím objektu. V moderních automatických řídicích systémech (ACS) jsou automatické řídicí systémy subsystémy ACS a používají se k regulaci různých parametrů při řízení objektu nebo procesu.
Principem činnosti každého automatického řídicího systému (ASS) je detekovat odchylky řízených veličin, které charakterizují provoz objektu nebo tok procesu od požadovaného režimu a zároveň objekt nebo proces takovým způsobem ovlivnit. jak tyto odchylky odstranit.
Pro realizaci automatické regulace je k regulovanému objektu připojen automatický regulátor, který generuje regulační účinek na regulační orgán. Tato regulační akce je generována regulátorem v závislosti na rozdílu mezi aktuální hodnotou regulované veličiny (teplota, tlak, hladina kapaliny atd.) měřenou čidlem a její požadovanou hodnotou nastavenou regulátorem. Řízený objekt a automatický regulátor tvoří společně automatický řídicí systém.
Hlavním rysem ACS je přítomnost hlavní zpětnovazební smyčky, pomocí které regulátor řídí hodnotu řízeného parametru.
Příklad systému regulace teploty
Na Obr. 87 ukazuje blokové schéma systému řízení teploty v zařízení a Obr. 88 funkční schéma ACS, znázorňující obecný princip činnosti jakéhokoli automatického řídicího systému.
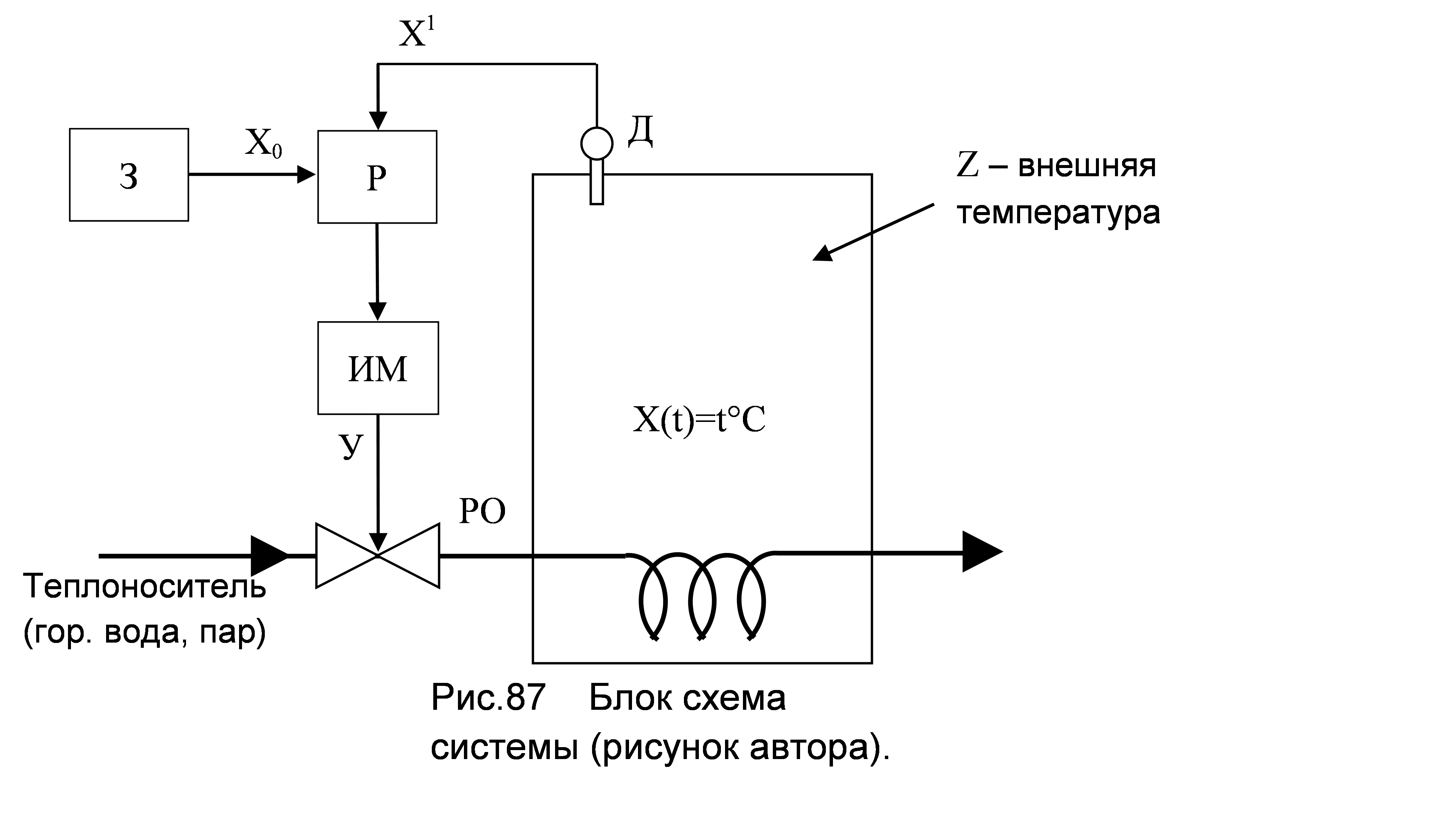
Pokud je teplota v objektu rovna nastavené teplotě, pak je signál ze snímače X 1 roven signálu z požadované hodnoty X0 a chybový signál na vstupu regulátoru e = X 1 – X0 = 0 QUOTE, na výstupu regulátoru není žádný signál, MI nefunguje a ventil je otevřen na nastavenou hodnotu a udržuje nastavenou teplotu. Pokud se např. zvýší teplota v objektu, zvýší se signál z čidla X1, dojde k chybě „e“, IM spustí a uzavře RO ventil pro snížení dodávky tepla, teplota v objektu klesne na nastavenou hodnotu. hodnota.
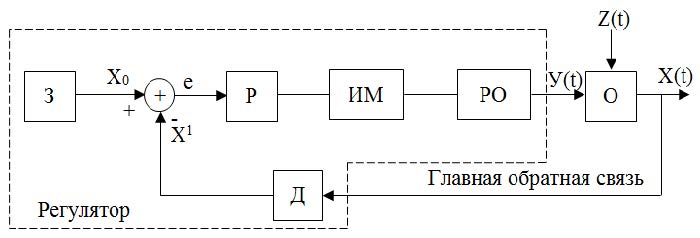
Rýže. 88 Funkční schéma ACS
Z – nastavovač, pro nastavení zadané hodnoty parametru X0
D – snímač (termočlánek, termistor, snímač hladiny, snímač rychlosti atd. pro různé systémy)
IM – pohon (elektromotor s převodovkou, pneumatické válce atd.)
RO – regulační těleso (baterie, ventil, klapka atd.)
О – předmět regulace (pec, elektromotor, nádrž atd.)
U – regulační (řídící) vliv
Z – interference (rušení)
X – nastavitelný parametr
X 1 – signál na výstupu snímače
e = Xi-X0 chyba, nastane, když se parametr odchyluje od specifikace
X0 – nastavená hodnota nastavitelného (řízeného) parametru může být konstantní X0 nebo měnitelné (Ut).
Signál z ovladače může být:
– konstanta X0 = konst. udržovat konstantní řízený parametr teploty, tlaku, hladiny kapaliny atd.. (stabilizační systémy);
-může se měnit v čase U(t) podle konkrétního programu (softwarová regulace);
-může se měnit v čase U(t) v souladu s naměřeným externím procesem (regulace sledování).
1.Jaké vlivy mohou způsobit změnu řízeného parametru?
2.Jak funguje zpětná vazba a proč je potřeba?
3.Jaké funkce plní D a IM?
4.Jak systém funguje, když dojde k chybě „e“?
5. Uveďte příklad stabilizačního systému a sledovacího systému?